The completed project at the Design Expo for ME 102B at UC Berkeley.
|
With all of the parts for the reel manufactured, Grace was able to assemble and do an initial test to see how well the reel is able to wrap the wire. The next step is to connect the reel to our powering system so that we will be able test the project as a whole.
Today Project Appa took a big step in our project goals. Our first flight test of the power system was successful. We were able to fly at small altitudes with the power system onboard and the tether cable we designed. The drone was completely powered from the wall. Next we will add a case to the power supply and possibly a fan to help with cooling. Here is a video of this test flight. Towards the end of this video you can see Justin using a laser thermometer to see the temperature of the power supply. After a 20 second flight the temperature rose to 322 °K. This shows we do not have enough airflow over the bottom of the power supply for adequate cooling. This will be addressed with the case.
With the new battery board adapter properly functioning and wire wrapped together, our group was able to test the entire power system for the drone. As can be seen in the video below, the propellers are rotating properly and ready for flight. Now we just need to attach everything together so that we can get the drone into the air. As you can see above, Grace is using an infrared digital thermometer to measure the approximate temperature of the board and heat sink so that our group can verify that our previous thermal calculations were correct and the heat sink is not required on the AC-DC power converter.
Yesterday team SkyBison tested the DJI Matrice 100 drone with the tether cable we designed. Justin attached the cable to the drone and we flew it for several minutes with battery power. This was the first chance several of us got to fly the drone so it was a lot of fun! Mainly, we were testing to see if a tug on the cable would cause the drone to fly in an unstable manner. After several large tugs at various angles we were able to conclude the cable will not hinder the flight of the drone. Next, the drone will be tested with the reel and power system we have designed. Here is a video clip from our testing. Today Xander, Justin and Alex assembled the 120 foot long tether cable that will provide power to the drone. We spent a significant amount of time researching what wire would be able to carry the necessary AC power to the drone. We ended up deciding on 22 AWG wire that has an outer diameter of 0.06 inches. We estimated the weight of this wire to be 544 grams. Since we are sending AC power to the drone this cable is composed of three individual wire strands. We chose to use shrink wrap every 6 inches to keep the strands together so that the cable stays organized and can be spooled in and out easily. The shrink wrap distance worked well and it should provide simple reeling. Weight of Tether Cable = 583.5 - 38.8 = 544.7 grams
The tether cables final weight is very close to our estimate of 544 grams and should not be too heavy for the drone to carry. Team SkyBison is excited to test the drone with the tether cable to see how it performs. After receiving the AC-DC power supply we plan to put on board our drone our group is concerned that it may be too heavy with the heat sink attached. The aluminium heat sink is a large block that weights roughly 1.5 lbs. If we could remove this without having the power supply overheat that would save a considerable amount of weight and improve the performance of the drone. After discussing this with Professor Lin, we decided to do some calculations as to whether the forced convection over the surface of the board would provide enough cooling. Assuming the power lost from converting to DC power was dissipated we were able to calculate the temperature the sink would be at with the following conditions: Conditions: Airflow Velocity= 2m/s Temperature of Air = 300 °K Efficiency of Power Supply = 82.5% Dimensions of Heatsink = .16 x 0.1 m 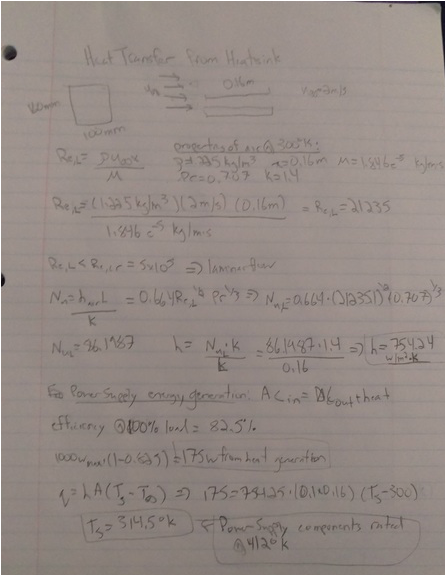 Results from Calculations:
Heat from power generation = 175 W Surface temp = 314.5 °K These calculations show the temperature of the power supply would rise to 314.5 °K. The power supply is rated up to 412 °K which validates our intuition that the power supply can operate safely without the heatsink. Further testing will be done this in April! 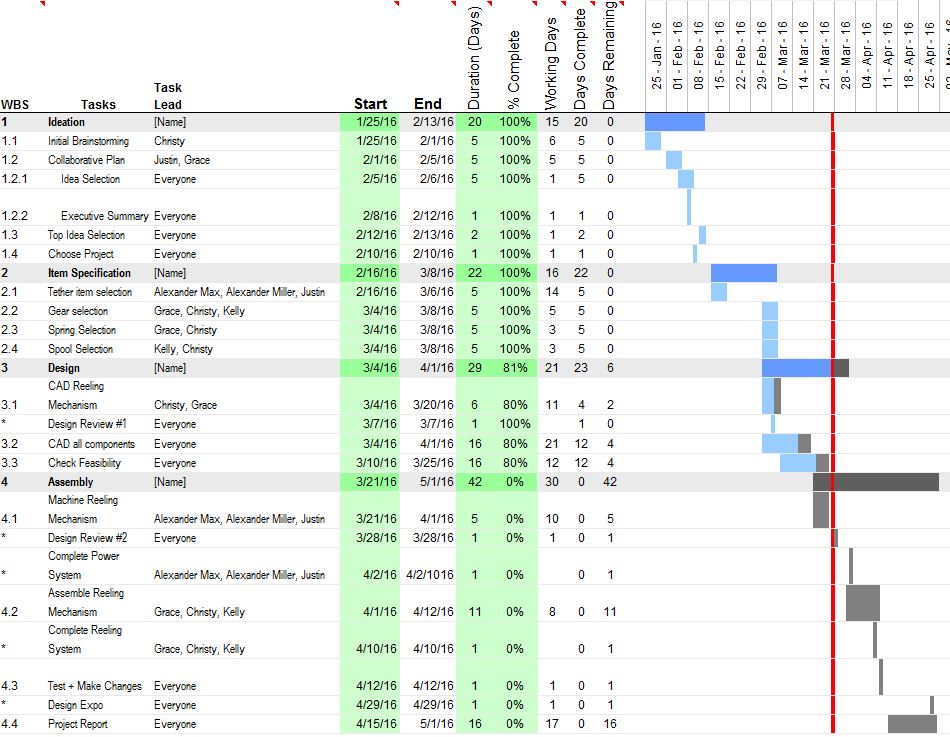 After Design Review 2 on March 28th team SkyBison is on schedule. We currently have all of our components and are in the end of the design phase and are working on assembly. The biggest hurdles we must overcome now is to build our reel and make sure that the tension is not too much for the drone too handle.One of the biggest issues our group has to tackle is replacing the existing battery power system with our own. We have designed a power system and Justin was able to test that it outputted the correct DC voltage to the drone several weeks ago in Jacobs Hall. This was a big checkpoint for our group, now we can begin braiding the wire and building the entire power system. 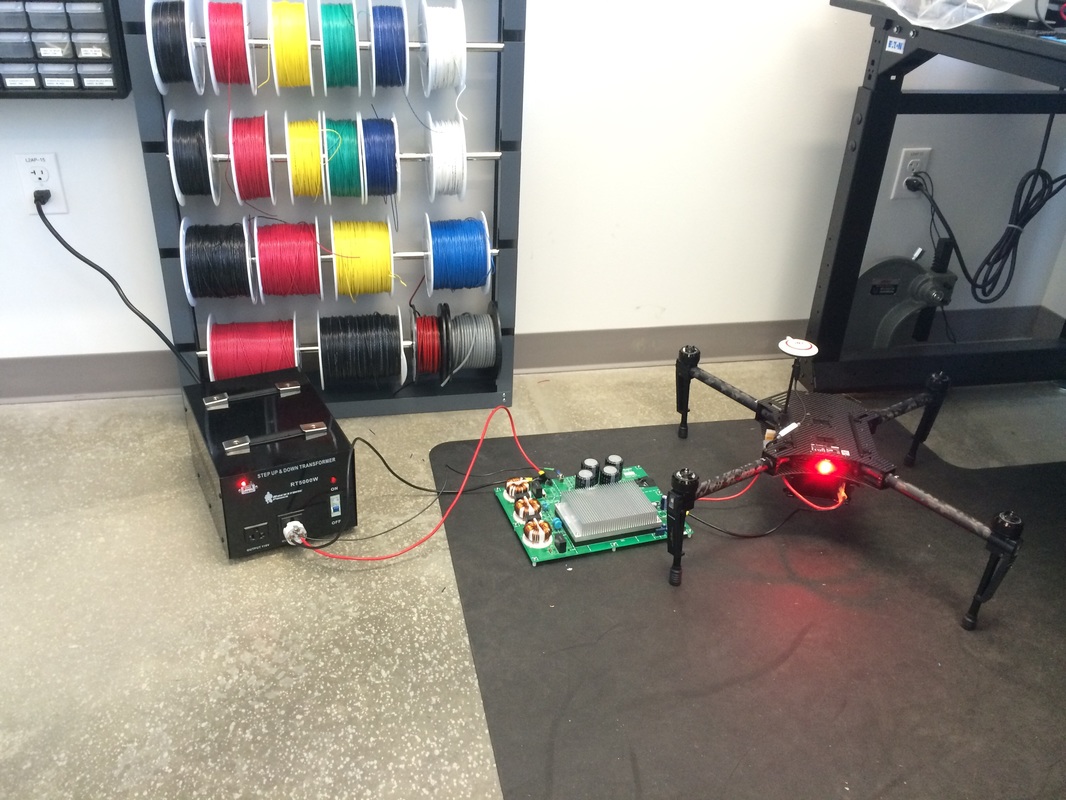 Based on the specifications provided by DJI, the expected payload for the M100 is 6.2 lbs without the stock battery. In order to verify that the drone was able to carry enough weight to support our project, we ran the battery powered drone with a payload of 5 lbs as shown below.  |
Archives
May 2016
Categories |
 RSS Feed
RSS Feed
